Для описания движения по окружности наряду с линейной скоростью вводят понятие угловой скорости. Если точка при движении по окружности за время \(\Delta t\) описывает дугу, угловая мера которой \(\Delta \varphi\), то угловая скорость \(\omega = \frac{{\Delta \varphi }}{{\Delta t}}\).
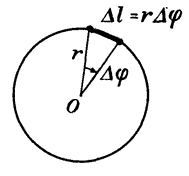
Угловая скорость \(\omega\) связана с линейной скоростью \(\upsilon\) соотношением \(\upsilon = \omega r\), где \(r\) — радиус окружности, по которой движется точка (рис. 1). Понятие угловой скорости особенно удобно для описания вращения твердого тела вокруг оси. Хотя линейные скорости у точек, находящихся на разном расстоянии от оси, будут неодинаковыми, их угловые скорости будут равны, и можно говорить об угловой скорости вращения тела в целом.
Задача
Диск, радиуса \(r\) катится без проскальзывания по горизонтальной плоскости. Скорость центра диска постоянная и равна \(\upsilon_п\). С какой угловой скоростью при этом вращается диск?
Каждая точка диска участвует в двух движениях — в поступательном движении со скоростью \(\upsilon_п\) вместе с центром диска и во вращательном движении вокруг центра с некоторой угловой скоростью \(\omega\).
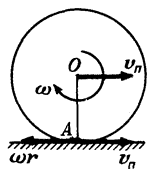
Для нахождения \(\omega\) воспользуемся отсутствием проскальзывания, то есть тем, что в каждый момент времени скорость точки диска, соприкасающейся с плоскостью, равна нулю. Это означает, что для точки А (рис. 2) скорость поступательного движения \(\upsilon_п\) равна по величине и противоположна по направлению линейной скорости вращательного движения \({\upsilon _{вр}} = \omega r\). Отсюда сразу получаем \(\omega = \frac{{{\upsilon _п}}}{r}\).
Задача
Найти скорости точек В, С и D того же диска (рис. 3).
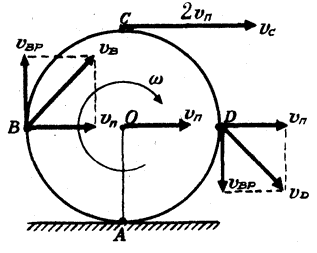
Рассмотрим вначале точку В. Линейная скорость ее вращательного движения направлена вертикально вверх и равна \({\upsilon _{вр}} = \omega r = \frac{{{\upsilon _п}}}{R}r = {\upsilon _п}\), то есть по величине равна скорости поступательного движения, которая, однако, направлена горизонтально. Складывая векторно эти две скорости, находим, что результирующая скорость \(\upsilon_B\) по величине равна \({\upsilon _п}\sqrt 2 \) и образует угол 45° с горизонтом. У точки С скорости вращательного и поступательного движения направлены в одну сторону. Результирующая скорость \(\upsilon_C\) равна \(2\upsilon_п\), и направлена горизонтально. Аналогично находится и скорость точки D (см. рис. 3).
Даже в том случае, когда скорость точки, движущейся по окружности, не меняется по величине, точка имеет некоторое ускорение, так как меняется направление вектора скорости. Это ускорение называется центростремительным. Оно направлено к центру окружности и равно
\[{a_ц} = {\omega ^2}r = \frac{{{\upsilon ^2}}}{R}\]
(\(R\) — радиус окружности, \(\omega\) и \(\upsilon\) — угловая и линейная скорости точки).
Если же скорость точки, движущейся по окружности, меняется не только по направлению, но и по величине, то наряду с центростремительным ускорением существует и так называемое тангенциальное ускорение. Оно направлено по касательной к окружности и равно отношению \(\frac{{\Delta \upsilon }}{{\Delta t}}\) (\({\Delta \upsilon }\) — изменение величины скорости за время \(\Delta t\)).
Задача
Найти ускорения точек А, В, С и D диска радиуса \(r\), катящегося без проскальзывания по горизонтальной плоскости. Скорость центра диска постоянна и равна \(\upsilon_п\) (рис. 3).
В системе координат, связанной с центром диска, диск вращается с угловой скоростью \(\omega\), а плоскость движется поступательно со скоростью \(\upsilon_п\). Проскальзывание между диском и плоскостью отсутствует, следовательно, \(\omega = \frac{{{\upsilon _п}}}{r}\). Скорость поступательного движения \(\upsilon_п\) не меняется, поэтому угловая скорость вращения диска постоянная и точки диска имеют только центростремительное ускорение \({a_ц} = {\omega ^2}r = \frac{{{\upsilon_п^2}}}{R}\), направленное к центру диска. Так как система координат движется без ускорения (с постоянной скоростью \(\upsilon_п\)), то в неподвижной системе координат ускорения точек диска будут теми же.
Перейдем теперь к задачам на динамику вращательного движения. Вначале рассмотрим простейший случай, когда движение по окружности происходит с постоянной скоростью. Так как ускорение тела при этом направлено к центру, то и векторная сумма всех сил, приложенных к телу, должна быть тоже направлена к центру, и по II закону Ньютона \(m{a_ц} = \sum F\).
Следует помнить, что в правую часть этого уравнения входят только реальные силы, действующие на данное тело со стороны других тел. Никакой центростремительной силы при движении по окружности не возникает. Этим термином пользуются просто для обозначения равнодействующей сил, приложенных к телу, движущемуся по окружности. Что касается центробежной силы, то она возникает только при описании движения по окружности в неинерциальной (вращающейся) системе координат. Мы пользоваться здесь понятием центростремительной и центробежной силы вообще не будем.
Задача
Определить наименьший радиус закругления дороги, которое автомобиль может пройти при скорости \(\upsilon=70\) км/ч и коэффициенте трения шин о дорогу \(k=0,3\).
На автомобиль действуют сила тяжести \(P=mg\), сила реакции дороги \(N\) и сила трения \(F_{тр}\) между шинами автомобиля и дорогой. Силы \(P\) и \(N\) направлены вертикально и равны по величине: \(P=N\). Сила трения, препятствующая проскальзыванию («заносу») автомобиля, направлена к центру поворота и сообщает центростремительное ускорение: \({F_{тр}} = \frac{{m{\upsilon ^2}}}{R}\). Максимальное значение силы трения \({F_{тр\max}} = kN = kmg\), поэтому минимальное значение радиуса окружности, по которой еще возможно движение со скоростью \(\upsilon\), определяется из уравнения \(\frac{{m{\upsilon ^2}}}{R} = kmg\). Отсюда \(R = \frac{{{\upsilon ^2}}}{{kg}} \approx 130\;м\).
Сила реакции дороги \(N\) при движении автомобиля по окружности не проходит через центр тяжести автомобиля. Это связано с тем, что ее момент относительно центра тяжести должен компенсировать момент силы трения, стремящийся опрокинуть автомобиль. Величина силы трения тем больше, чем больше скорость автомобиля \(\left( {{F_{тр}} = \frac{{m{\upsilon ^2}}}{R}} \right)\). При некотором значении скорости момент силы трения превысит момент силы реакции и автомобиль опрокинется.
Задача
При какой скорости автомобиль, движущийся по дуге окружности радиуса \(R=130\) м, может опрокинуться? Центр тяжести автомобиля находится на высоте \(h=1\) м над дорогой, ширина следа автомобиля \(l=1,5\) м (рис. 4).
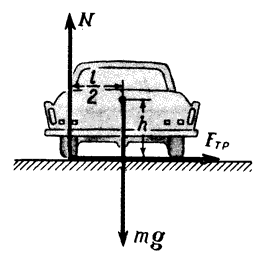
В момент опрокидывания автомобиля как сила реакции дороги \(N\), так и сила трения \(F_{тр}\) приложены к «внешнему» колесу. При движении автомобиля по окружности со скоростью \(\upsilon\) на него действует сила трения \(\left( {{F_{тр}} = \frac{{m{\upsilon ^2}}}{R}} \right)\). Эта сила создает момент относительно центра тяжести автомобиля \({M_{тр}} = \frac{{m{\upsilon ^2}}}{R}h\). Максимальный момент силы реакции дороги \(N=mg\) относительно центра тяжести равен \(mg\frac{l}{2}\) (в момент опрокидывания сила реакции проходит через внешнее колесо). Приравнивая эти моменты, найдем уравнение для максимальной скорости, при которой автомобиль еще не опрокинется:
\[\frac{{m{\upsilon ^2}}}{R}h = \frac{{mgl}}{2},\]
откуда
\[\upsilon = \sqrt {\frac{{glR}}{{2h}}} \approx 30\;м/с \approx 110\;км/ч.\]
Чтобы автомобиль мог двигаться с такой скоростью, необходим коэффициент трения \(k \geq \frac{{{\upsilon ^2}}}{{gR}}\) (см. предыдущую задачу).
Аналогичная ситуация возникает при повороте мотоцикла или велосипеда. Сила трения, создающая центростремительное ускорение, имеет момент относительно центра тяжести, стремящийся опрокинуть мотоцикл. Поэтому для компенсации этого момента моментом силы реакции дороги мотоциклист наклоняется в сторону поворота (рис. 5).
Задача
Мотоциклист едет по горизонтальной дороге со скоростью \(\upsilon=70\) км/ч, делая поворот радиусом \(R=100\) м. На какой угол \(\alpha\) к горизонту он должен при этом наклониться, чтобы не упасть?
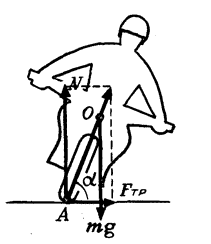
Сила трения между мотоциклом и дорогой \({{F_{тр}} = \frac{{m{\upsilon ^2}}}{R}}\), так как она сообщает мотоциклисту центростремительное ускорение. Сила реакции дороги \(N=mg\). Условие равенства моментов силы трения и силы реакции относительно центра тяжести дает уравнение: \({F_{тр}} \cdot l\sin \alpha = Nl\cos \alpha\), где \(l\) — расстояние OA от центра тяжести до следа мотоцикла (см. рис. 5).
Подставляя сюда значения \(F_{тр}\) и \(N\), находим что \({\text{tg}}\alpha = \frac{{gR}}{{{\upsilon ^2}}}\) или \(\alpha = {\text{arctg}}\frac{{gR}}{{{\upsilon ^2}}} \approx 70^\circ\). Отметим, что равнодействующая сил \(N\) и \(F_{тр}\) при этом угле наклона мотоцикла проходит через центр тяжести, что и обеспечивает равенство нулю суммарного момента сил \(N\) и \(F_{тр}\).
Для того, чтобы увеличить скорость движения по закруглению дороги, участок дороги на повороте делают наклонным. При этом в создании центростремительного ускорения, кроме силы трения, участвует и сила реакции дороги.
Задача
С какой максимальной скоростью \(\upsilon\) может двигаться автомобиль по наклонному треку с углом наклона \(\alpha\) при радиусе закругления \(R\) и коэффициенте трения шин о дорогу \(k\)?
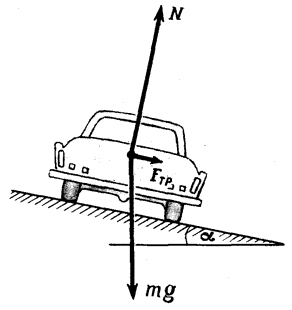
На автомобиль действуют сила тяжести \(mg\), сила реакции \(N\), направленная перпендикулярно плоскости трека, и сила трения \(F_{тр}\), направленная вдоль трека (рис. 6). Так как нас не интересуют в данном случае моменты сил, действующих на автомобиль, мы нарисовали все силы приложенными к центру тяжести автомобиля. Векторная сумма всех сил должна быть направлена к центру окружности, по которой движется автомобиль, и сообщать ему центростремительное ускорение. Поэтому сумма проекций сил на направление к центру (горизонтальное направление) равна \(\frac{{m{\upsilon ^2}}}{R}\), то есть \(\frac{{m{\upsilon ^2}}}{R} = N\sin \alpha + {F_{тр}}\cos \alpha\).
Сумма проекций всех сил на вертикальное направление равна нулю:
\[N\cos \alpha — mg — {F_{тр}}\sin \alpha = 0.\]
Подставляя в эти уравнения максимальное возможное значение силы трения \(F_{тр}=kN\) и исключая силу \(N\), находим максимальную скорость \(\upsilon = \sqrt {gR\frac{{k + {\text{tg}}\alpha }}{{1 — k{\text{tg}}\alpha }}}\), с которой еще возможно движение по такому треку. Это выражение всегда больше значения \(\sqrt {kgR}\), соответствующего горизонтальной дороге.
Разобравшись с динамикой поворота, перейдем к задачам на вращательное движение в вертикальной плоскости.
Задача
Автомобиль массы \(m=1,5\) т движется со скоростью \(\upsilon=70\) км/ч по дороге, показанной на рисунке 7. Участки дороги АВ и ВС можно считать дугами окружностей радиуса \(R=200\) м, касающимися друг друга в точке В. Определить силу давления автомобиля на дорогу в точках А и С. Как меняется сила давления при прохождении автомобилем точки В?
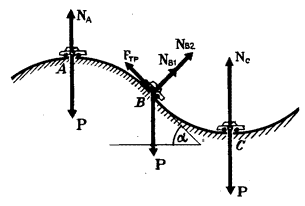
В точке A на автомобиль действуют сила тяжести \(P=mg\) и сила реакции дороги \(N_A\). Векторная сумма этих сил должна быть направлена к центру окружности, то есть вертикально вниз, и создавать центростремительное ускорение: \(\frac{{m{\upsilon ^2}}}{R} = P — {N_A}\), откуда \({N_A} = mg — \frac{{m{\upsilon ^2}}}{R} \approx 12 \cdot {10^3}\;Н\). Сила давления автомобиля на дорогу равна по величине и противоположна по направлению силе реакции. В точке С векторная сумма сил направлена вертикально вверх: \(\frac{{m{\upsilon ^2}}}{R} = {N_C} — P\) и \({N_C} = mg + \frac{{m{\upsilon ^2}}}{R} = 18 \cdot {10^3}\;Н\).
Таким образом, в точке А сила давления меньше силы тяжести, а в точке С — больше.
В точке В автомобиль переходит с выпуклого участка дороги на вогнутый (или наоборот). При движении по выпуклому участку проекция силы тяжести на направление к центру должна превышать силу реакции дороги \(N_{B1}\), причем \(P\cos \alpha — {N_{B1}} = \frac{{m{\upsilon ^2}}}{R}\). При движении по вогнутому участку дороги, наоборот, сила реакции дороги \(N_{B2}\) превосходит проекцию силы тяжести:
\[{N_{B2}} — P\cos \alpha = \frac{{m{\upsilon ^2}}}{R}.\]
Из этих уравнений получаем, что при прохождении точки В сила давления автомобиля на дорогу меняется скачком на величину \(\frac{{2m{\upsilon ^2}}}{R} \approx 6 \cdot {10^3}\) Н. Разумеется, такие ударные нагрузки действуют разрушающе как на автомобиль, так и на дорогу. Поэтому дороги и мосты всегда стараются делать так, чтобы их кривизна менялась плавно.
При движении автомобиля по окружности с постоянной скоростью сумма проекций всех сил на направление, касательное к окружности, должна быть равна нулю. В нашем случае касательная составляющая силы тяжести уравновешивается силой трения между колесами автомобиля и дорогой.
Величина силы трения регулируется вращательным моментом, прикладываемым к колесам со стороны мотора. Этот момент стремится вызвать проскальзывание колес относительно дороги. Поэтому возникает сила трения, препятствующая проскальзыванию и пропорциональная приложенному моменту. Максимальное значение силы трения равно \(kN\), где \(k\) — коэффициент трения между шинами автомобиля и дорогой, \(N\) — сила давления на дорогу. При движении автомобиля вниз сила трения играет роль тормозящей силы, а при движении вверх, наоборот, роль силы тяги.
Задача
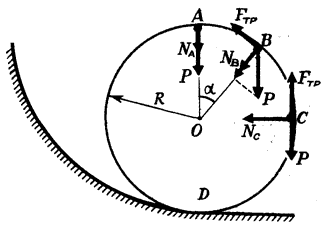
Автомобиль массой \(m=0,5\) т, движущийся со скоростью \(\upsilon=200\) км/ч, совершает «мертвую петлю» радиуса \(R=100\) м (рис. 8). Определить силу давления автомобиля на дорогу в верхней точке петли A; в точке B, радиус-вектор которой составляет угол \(\alpha=30^\circ\) с вертикалью; в точке С, в которой скорость автомобиля направлена вертикально. Возможно ли движение автомобиля по петле с такой постоянной скоростью при коэффициенте трения тин о дорогу \(k=0,5\)?
В верхней точке петли сила тяжести и сила реакции дороги \(N_A\) направлены вертикально вниз. Сумма этих сил создает центростремительное ускорение: \(\frac{{m{\upsilon ^2}}}{R} = {N_A} + mg\).
Поэтому \({N_A} = \frac{{m{\upsilon ^2}}}{R} — mg \approx {10^4}\;Н\).
Сила давления автомобиля на дорогу равна по величине и противоположна по направлению силе \(N_A\).
В точке В центростремительное ускорение создается суммой силы реакции и проекции силы тяжести на направление к центру: \(\frac{{m{\upsilon ^2}}}{R} = {N_B} + mg\cos \alpha\). Отсюда
\[{N_B} = \frac{{m{\upsilon ^2}}}{R} — mg\cos \alpha \approx 11 \cdot {10^3}\;Н\]
Легко видеть, что \({N_B} > {N_A}\); с увеличением угла \(\alpha\) сила реакции дороги увеличивается.
В точке С сила реакции \({N_C} = \frac{{m{\upsilon ^2}}}{R} \approx 15 \cdot {10^3}\) Н; центростремительное ускорение в этой точке создается только силой реакции, а сила тяжести направлена по касательной. При движении по нижней части петли сила реакции будет превышать \(\frac{{m{\upsilon ^2}}}{R}\) и максимальное значение \(\frac{{m{\upsilon ^2}}}{R} — mg \approx 20 \cdot {10^3}\) Н сила реакции имеет в точке D. Значение \({N_A} = \frac{{m{\upsilon ^2}}}{R} — mg\), таким образом, является минимальным значением силы реакции.
Скорость автомобиля будет постоянной, если касательная составляющая силы тяжести не превышает максимальной силы трения \(kN\) во всех точках петли. Это условие заведомо выполняется, если минимальное значение \(kN = k{N_A} = km\left( {\frac{{{\upsilon ^2}}}{R} — g} \right)\) превосходит максимальное значение касательной составляющей силы веса. В нашем случае это максимальное значение равно \(mg\) (оно достигается в точке С), и условие \(km\left( {\frac{{{\upsilon ^2}}}{R} — g} \right) > mg\) выполняется при \(k=0,5\), \(\upsilon=200\) км/ч, \(R=100\) м.
Таким образом, в нашем случае движение автомобиля по «мертвой петле» с постоянной скоростью возможно.
Рассмотрим теперь движение автомобиля по «мертвой петле» с выключенным мотором. Как уже отмечалось, обычно момент силы трения противодействует моменту, приложенному к колесам со стороны мотора. При движении автомобиля с выключенным мотором этого момента нет, и силой трения между колесами автомобиля и дорогой можно пренебречь.
Скорость автомобиля уже не будет постоянной — касательная составляющая силы тяжести замедляет или ускоряет движение автомобиля по «мертвой петле». Центростремительное ускорение тоже будет меняться. Создается оно, как обычно, равнодействующей силы реакции дороги и проекции силы тяжести на направление к центру петли.
Задача
Какую наименьшую скорость должен иметь автомобиль в нижней точке петли D (см. рис. 8 ) для того, чтобы совершить ее с выключенным мотором? Чему будет равна при этом сила давления автомобиля на дорогу в точке В? Радиус петли \(R=100\) м, масса автомобиля \(m=0,5\) т.
Посмотрим, какую минимальную скорость может иметь автомобиль в верхней точке петли А, чтобы продолжать двигаться по окружности?
Центростремительное ускорение в этой точке дороги создается суммой силы тяжести и силы реакции дороги \(\frac{{m\upsilon _A^2}}{R} = mg + {N_A}\). Чем меньшую скорость имеет автомобиль, тем меньшая возникает сила реакции \(N_A\). При значении \({\upsilon _A} = \sqrt {gR}\) эта сила обращается в нуль. При меньшей скорости сила тяжести превысит значение, необходимое для создания центростремительного ускорения, и автомобиль оторвется от дороги. При скорости \({\upsilon _A} = \sqrt {gR}\) сила реакции дороги обращается в нуль только в верхней точке петли. В самом деле, скорость автомобиля на других участках петли будет большей, и как легко видеть из решения предыдущей задачи, сила реакции дороги тоже будет большей, чем в точке А. Поэтому, если автомобиль в верхней точке петли имеет скорость \({\upsilon _A} = \sqrt {gR}\), то он нигде не оторвется от петли.
Теперь определим, какую скорость должен иметь автомобиль в нижней точке петли D, чтобы в верхней точке петли А его скорость \({\upsilon _A} = \sqrt {gR}\). Для нахождения скорости \(\upsilon_D\) можно воспользоваться законом сохранения энергии, как если бы автомобиль двигался только под действием силы тяжести. Дело в том, что сила реакции дороги в каждый момент направлена перпендикулярно перемещению автомобиля, а следовательно, ее работа равна нулю (напомним, что работа \(\Delta A = F\Delta S\cos \alpha\), где \(\alpha\) — угол между силой \(F\) и направлением перемещения \(\Delta S\)). Силой трения между колесами автомобиля и дорогой при движении с выключенным мотором можно пренебречь. Поэтому сумма потенциальной и кинетической энергии автомобиля при движении с выключенным мотором не меняется.
Приравняем значения энергии автомобиля в точках А и D. При этом будем отсчитывать высоту от уровня точки D, то есть потенциальную энергию автомобиля в этой точке будем считать равной нулю. Тогда получаем
\[\frac{{m\upsilon _D^2}}{2} = \frac{{m\upsilon _A^2}}{2} + 2mgR.\]
Подставляя сюда значение \({\upsilon _A} = \sqrt {gR}\) для искомой скорости \(\upsilon _D\), находим:
\[{\upsilon _D} = \sqrt {5gR} \approx 70\;м/с \approx 260\;км/ч.\]
Если автомобиль въедет в петлю с такой скоростью, то он сможет совершить ее с выключенным мотором.
Определим теперь, с какой силой при этом автомобиль будет давить на дорогу в точке В. Скорость автомобиля в точке В опять легко находится из закона сохранения энергии:
\[\frac{{m\upsilon _D^2}}{2} = \frac{{m\upsilon _B^2}}{2} + mgR\left( {1 + \cos \alpha } \right).\]
Подставляя сюда значение \({\upsilon_D} = \sqrt {5gR}\), находим, что скорость \({\upsilon _B} = \sqrt {gR\left( {3 — 2\cos \alpha } \right)}\).
Воспользовавшись решением предыдущей задачи, по заданной скорости находим силу давления в точке В:
\[{N_B} = \frac{{m\upsilon _B^2}}{R} — mg\cos \alpha = 3mg\left( {1 — \cos \alpha } \right) \approx 2 \cdot {10^3}\;Н\]
Аналогично можно найти силу давления в любой другой точке «мертвой петли».
Упражнения
- Найти угловую скорость искусственного спутника Земли, вращающегося по круговой орбите с периодом обращения \(T=88\) мин. Найти линейную скорость движения этого спутника, если известно, что его орбита расположена на расстоянии \(R=200\) км от поверхности Земли.
- Диск радиуса \(R\) помещен между двумя параллельными рейками. Рейки движутся со скоростями \(\upsilon_1\) и \(\upsilon_2\). Определить угловую скорость вращения диска и скорость его центра. Проскальзывание отсутствует.
- Диск катится по горизонтальной поверхности без проскальзывания. Показать, что концы векторов скоростей точек вертикального диаметра находятся на одной прямой.
- Самолет движется по окружности с постоянной горизонтальной скоростью \(\upsilon=700\) км/ч. Определить радиус \(R\) этой окружности, если корпус самолета наклонен на угол \(\alpha=5^\circ\).
- Груз массы \(m=100\) г, подвешенный на нити длины \(l=1\) м, равномерно вращается по кругу в горизонтальной плоскости. Найти период обращения груза, если при его вращении нить отклонена по вертикали на угол \(\alpha=30^\circ\). Определить также натяжение нити.
- Автомобиль движется со скоростью \(\upsilon=80\) км/ч по внутренней поверхности вертикального цилиндра радиуса \(R=10\) м по горизонтальному кругу. При каком минимальном коэффициенте трения между шинами автомобиля и поверхностью цилиндра это возможно?
- Груз массой \(m\) подвешен на нерастяжимой нити, максимально возможное натяжение которой равно \(1,5mg\). На какой максимальный угол \(\alpha\) можно отклонить нить от вертикали, чтобы при дальнейшем движении груза нить не оборвалась? Чему будет равно при этом натяжение нити в тот момент, когда нить составит угол \(\frac{\alpha}{2}\) с вертикалью?
Источник: Журнал “Квант”, №5 1972 г. Автор: Л. Асламазов.